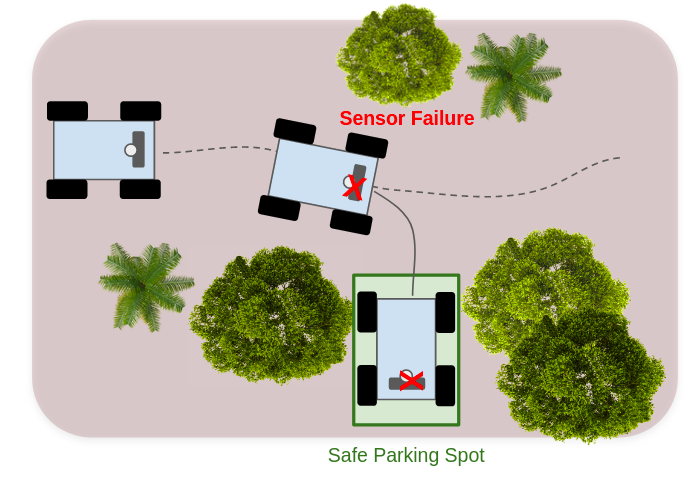
Autonomous, non-holonomic wheeled robots are being increasingly used in unstructured environments for operations like exploration, search and rescue, etc. Many situations may require robots to park themselves during navigation and operation in these types of environments. These situations can arise due to various reasons such as sensor failure, unfavorable operating conditions, etc., but specifying a safe parking spot and navigating to it safely can be difficult in unstructured environments. Moreover, for certain applications these robots usually operate in groups of heterogeneous robots and have to efficiently plan their routines to prevent interference among themselves. This creates a need for each robot to plan out feasible paths to navigate and also make space for other robots by safely moving aside. In this report, we aim to develop a planner for non-holonomic wheeled robots to reach any given goal position and orientation safely in unstructured environments with multiple obstacles. We also present a novel solution to efficiently find a safe parking location for a vehicle in its surrounding environment. This allows the vehicle to either safely stop when faced with adversarial scenarios or allow other robots in its team to navigate through the environment. We demonstrate the success of our approach through simulated and hardware results on mobile ground robots.
Access the report here 🔗
Some take aways:● Developed motion primitives based on robot dynamics
● Developed a lattice based planner in C++ to generate collision-free path for safe parking of autonomous wheeled robot in unstructured environments and adversarial situations
● Optimized and deployed the planner on RC trucks for real time application to find best parking spot within 1 sec
Here is a demo video: